魔視智能融合算法利用不同時間和空間的多傳感器數據資源,在解決目標探測、識別和跟蹤等問題有更好的可靠性和魯棒性,增強目標車輛的可信度,并擴展整個系統的空間覆蓋率。

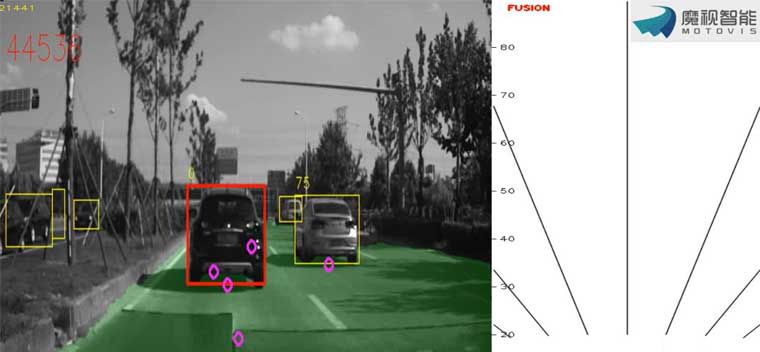
基于深度學習的視覺感知與毫米波雷達融合系統通過對目標的過濾、跟蹤、關聯、融合等步驟,將視覺極強的識別能力與雷達高精度測量特點集于一體,二者互相補充、互相驗證,使得系統精度、檢出率、虛警率、適應工況、可靠性和冗余度等都得到進一步提高,可以有效解決雷達傳感器的多種corner case。
該系統經過數萬公里測試,覆蓋了全國20多省份及各種極端天氣。可廣泛應用于碰撞預警、主動剎車、自適應巡航等系統。

基于全景環視圖像的深度學習檢測,夠有效識別地面停車位、低矮障礙物、路沿、以及兒童、寵物等目標,彌補超聲波傳感器的檢測盲點,并提前發現超聲檢測距離之外的運動行人和車輛。通過對超聲和視覺檢測的融合,魔視智能實現了完整的環境感知,避免倒車時碰撞造成的輪胎損壞或人員傷害。
此技術可應用于自動泊車輔助(APA)、自主代客泊車(AVP)等系統,實現更為安全,可靠的泊車功能。